Manual del propietario
AJUSTE DE REFERENCIA (RECONOCIMIENTO SECUENCIAL)
PRECAUCIÓN / AVISO / OBSERVACIÓN
AVISO:
Asegúrese de leer "Before Starting Target Adjustment" antes de empezar a trabajar.
Haga clic aquí .gif)
PROCEDIMIENTO
1. ASEGURE EL ÁREA ADECUADA PARA LLEVAR A CABO EL APRENDIZAJE
| (a) Aparque el vehículo en una superficie nivelada. OBSERVACIÓN:
|
|
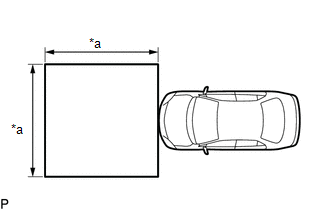
(b) Compruebe el nivelado del suelo.
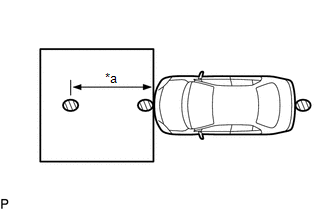
(1) Compruebe el nivelado del suelo en los 3 puntos que se muestran en la ilustración.
|
*a | 2.2 m (7.22 pi.) |
.png) |
Levelness Check Point |
(2) Coloque el nivel de cada punto de comprobación de nivelado y compruebe que la burbuja de aire del nivel está centrada.
.png)
(c) Ajuste la presión de inflado de los neumáticos al valor especificado.
Haga clic aquí
(d) Limpie el cristal del parabrisas.
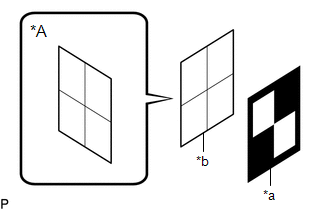
2. CREE EL DESTINO
AVISO:
No lamine el objetivo ni añada materiales reflectantes, como por ejemplo cintas adhesivas de color claro en su superficie. Si en la superficie del objetivo hay zonas reflectantes, aparecerán de color blanco a la cámara de reconocimiento de avance y es posible que no se reconozca el objetivo.
.png)
|
*a | Actual Target |
*b | Target as Seen by Forward Recognition Camera |
|
|
Objeto o superficie reflectante |
- | - |
(a) Imprima la ilustración.
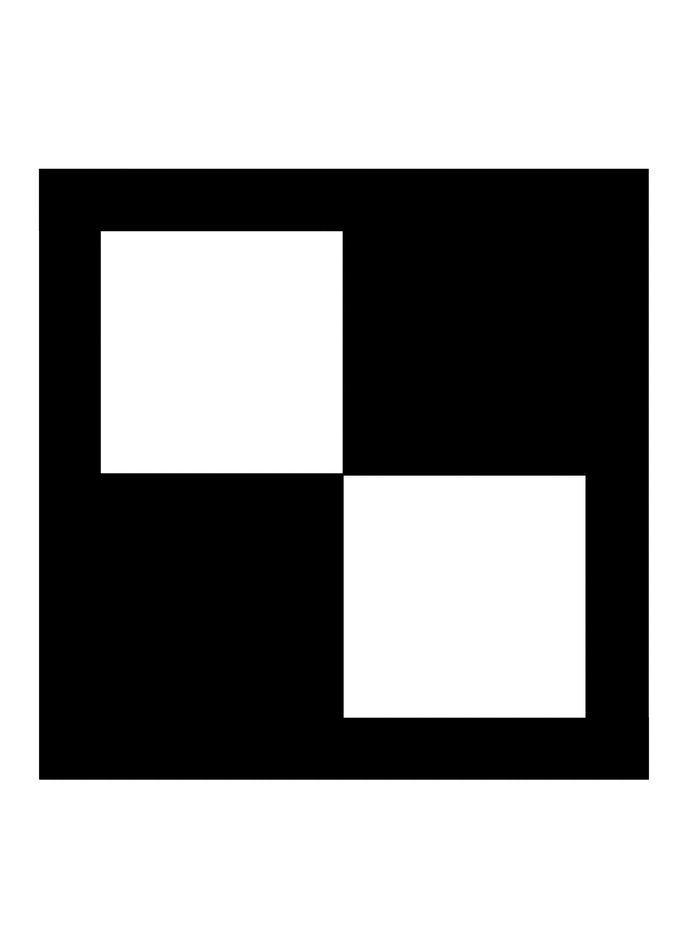
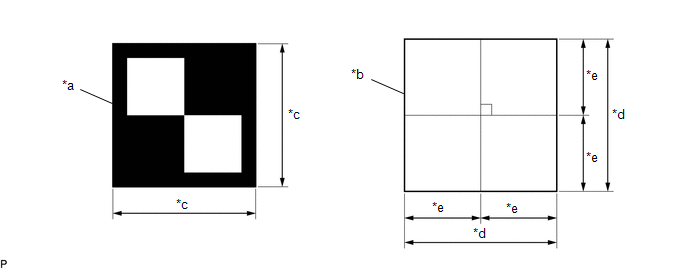
(b) Compruebe que las dimensiones se encuentren dentro de los valores que se muestran en la ilustración.
.png)
|
*a | 18 mm (00.709 pulg.) |
*b | 90 mm (3.54 pulg.) |
|
*c | 180 mm (7.09 pulg.) |
*d | Borroso |
|
*e | Distorsionado |
- | - |
AVISO:
OBSERVACIÓN:
Si las dimensiones de la hoja de objetivos creada no se encuentran en los valores especificados +/- 5 mm (00.197 pulg.). ajuste la configuración de la impresora y la hoja de objetivos de modo que las dimensiones sean las especificadas.
(c) Corte un trozo de cartón un poco más ancho que la hoja del objetivo.
|
*a | Hoja de objetivos |
*b | Cartón |
|
*c | 180 mm (7.09 pulg.) |
*d | 190 mm (7.48 pulg.) o más |
|
*e | 95 mm (3.74 pulg.) o más |
- | - |
| (d) Tenga preparado un trozo de cartón y dibuje líneas tal y como se muestra en la ilustración. OBSERVACIÓN: Las líneas de la parte posterior del objetivo pueden ayudar a alinear el objetivo con la SST (reflector). |
|
(e) Coloque la hoja de encima del cartón con la parte negra en la parte superior derecha, tal y como se muestra en la ilustración, y fije la hoja de objetivos con cinta adhesiva de doble cara.
AVISO:
No adhiera materiales reflectantes, como cinta adhesiva transparente, en la superficie de la hoja de objetivos ya que podría dificultar el reconocimiento del objetivo.
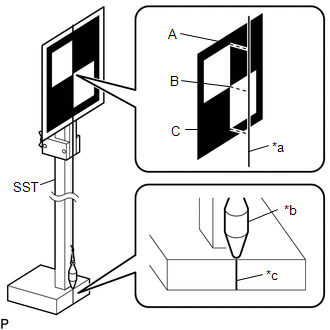
(f) Extraiga la SST (reflector) de la SST (soporte de base).
SST: 09870-60000
09870-60010
09870-60020
(g) Alinee el centro de la hoja de objetivos con la SST (reflector) y fije el objetivo a la SST (reflector) con cinta adhesiva de doble cara.
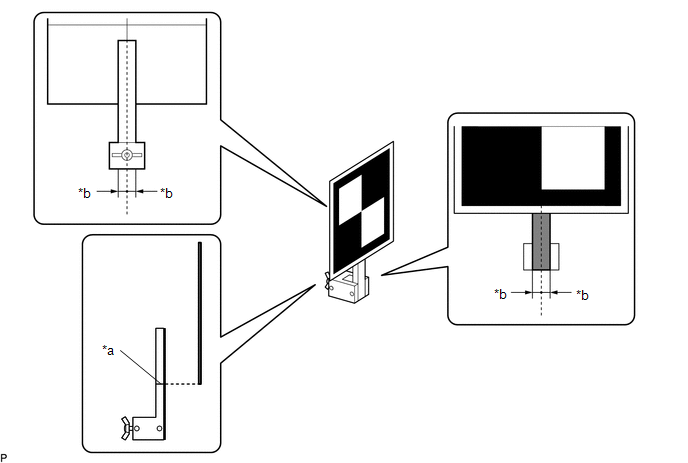
|
*a | Línea marcada |
*b | Misma distancia al centro |
.png) |
Reflective Surface | - |
- |
(h) Aplique cinta adhesiva en la superficie reflectante de la SST (reflector) para cubrirla.
(i) Coloque la SST (reflector) en la SST (soporte de base).
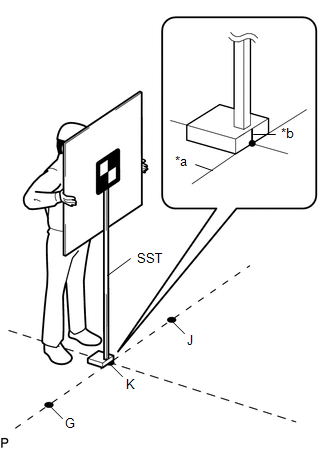
| (j) Cuelgue un peso acabado en punta desde el centro de la hoja de objetivos y alinéelo con la marca de la SST (soporte de base) como se muestra en la ilustración. OBSERVACIÓN: Asegúrese de que los puntos (A), (B) y (C) de la hoja de objetivos estén alineados con la cuerda. |
|
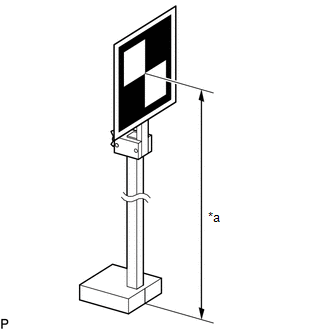
| (k) Mueva la SST (reflector) hacia arriba y hacia abajo para que centro del objetivo esté a la altura indicada en la ilustración y fije la SST (reflector) en su lugar. OBSERVACIÓN: Si el centro de la hoja de objetivos no se encuentra dentro de la altura especificada de +/- 6 mm (00.236 pulg.). ajuste la posición del SST (reflector) de manera que la altura sea la especificada. |
|
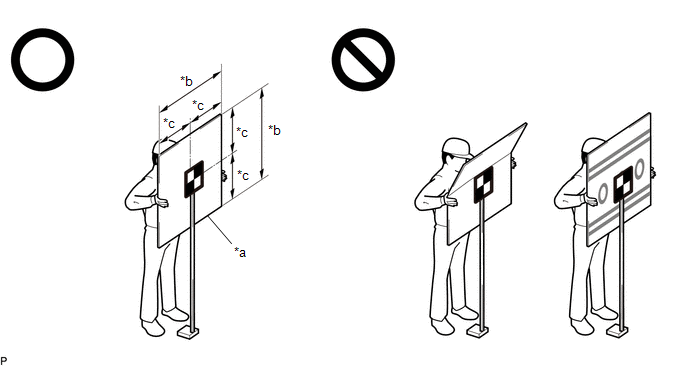
(l) Prepare un objeto para bloquear la zona situada detrás del objetivo. (Si detrás de la zona donde se colocará el objetivo se encuentra algún objeto que pueda ser confundido como objetivo.)
(1) Cuando oculte el fondo sujetando un cartón detrás del objetivo:
|
*a | Cartón |
*b | 840 mm (33.07 pulg.) o más |
|
*c | 420 mm (16.54 pulg.) o más |
- | - |
OBSERVACIÓN:
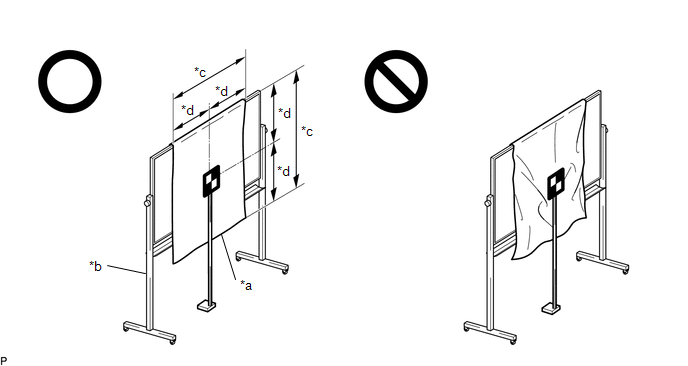
(2) Cuando oculte el fondo con una tela de color:
|
*a | Light Colored Plain Cloth |
*b | Pizarra blanca o similar |
|
*c | 840 mm (33.07 pulg.) o más |
*d | 420 mm (16.54 pulg.) o más |
OBSERVACIÓN:
3. DETERMINE LA POSICIÓN DE COLOCACIÓN DEL OBJETIVO
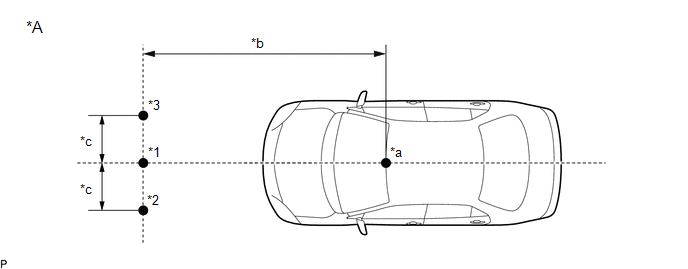
(a) Determine la posición de colocación del objetivo.
|
*A | Target Placement Positions |
- | - |
|
*1 | Placement Point 1 |
*2 | Placement Point 2 |
|
*3 | Placement Point 3 |
- | - |
|
*a | Posición de la cámara de reconocimiento de avance |
*b | 3000 mm (118.11 pulg.) |
|
*c | 550 mm (21.65 pulg.) |
- | - |
(b) Cuelgue un peso acabado en punta del centro del emblema trasero y marque el punto central trasero del vehículo (punto A) en el suelo.
.png)
|
*a | Cuerda |
*b | Peso |
|
*c | Centro |
- | - |
OBSERVACIÓN:
Tire ligeramente con los dedos de la cuerda varias veces para confirmar que sea perpendicular al suelo.
(c) Cuelgue un peso acabado en punta del centro del emblema delantero y marque el punto central delantero del vehículo (punto B) en el suelo (posición de colocación).
.png)
|
*a | Cuerda |
*b | Peso |
|
*c | Centro |
- | - |
OBSERVACIÓN:
Tire ligeramente con los dedos de la cuerda varias veces para confirmar que sea perpendicular al suelo.
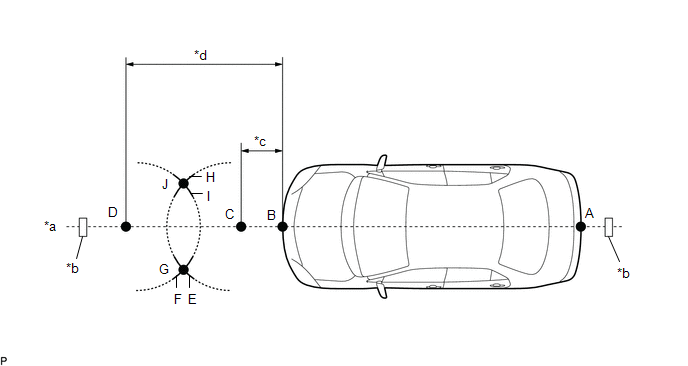
(d) Utilice una cinta y una cadena para crear una línea que conecte los puntos A y B y se extienda al menos 2100 mm (6.89 pi.) más allá del punto central delantero del vehículo.
|
*a | Cuerda |
*b | Cinta |
|
*c | 242 mm (9.53 pulg.) |
*d | 1912 mm (6.27 pi.) |
OBSERVACIÓN:
(e) Marque el punto C a 242 mm (9.53 pulg.) frente al punto B.
(f) Marque el punto D a 1912 mm (6.27 pi.) frente al punto B.
(g) Con la ayuda de una cuerda, marque la línea E a 1000 mm (3.28 pi.) del punto C.
(h) Con la ayuda de una cuerda, marque la línea H a 1000 mm (3.28 pi.) del punto C.
(i) Con la ayuda de una cuerda, marque la línea F a 1000 mm (3.28 pi.) del punto D.
(j) Con la ayuda de una cuerda, marque la línea I a 1000 mm (3.28 pi.) del punto D.
(k) Marque el punto G (punto de posición 2) en el lugar en el que la línea E y la F se cruzan.
(l) Marque el punto J (punto de posición 3) en el lugar en el que la línea H y la I se cruzan.
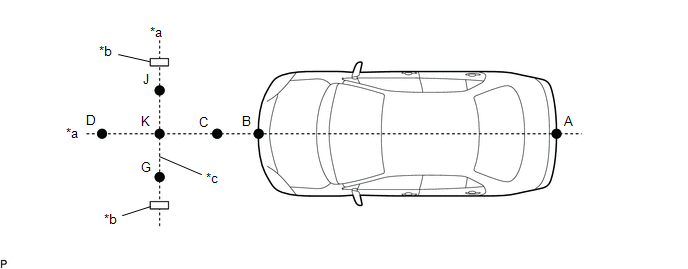
(m) Utilice cinta adhesiva y una cuerda para crear una línea que conecta los puntos G y J (línea de posición del objetivo).
|
*a | Cuerda |
*b | Cinta |
|
*c | Línea de posición del objetivo |
- | - |
OBSERVACIÓN:
(n) Marque el punto K (punto de posición 1) en el punto en que los puntos de conexión C y D y los puntos de conexión G y J de la cuerda se cruzan.
(o) Asegúrese de que la distancia entre los puntos K y G (posiciones de colocación 1 y 2), y K y J (posiciones de colocación 1 y 3) sea de 550 mm (21.65 pulg.).
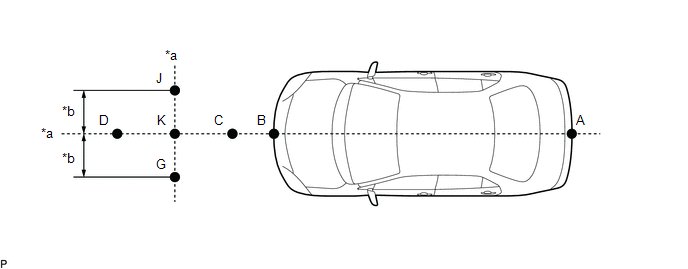
|
*a | Cuerda |
*b | 550 mm (21.65 pulg.) |
AVISO:
Si la distancia entre cada par de puntos no está dentro de +/- 3 mm (00.118 pulg.) del valor especificado. vuelva a comenzar desde la marca del punto A.
4. LLEVE A CABO EL APRENDIZAJE DEL EJE ÓPTICO DE LA CÁMARA DE RECONOCIMIENTO DE AVANCE
AVISO:
(a) Lleve a cabo Recognition Camera/Target Position Memory.
(1) Conecte el Techstream al DLC3.
(2) Coloque el interruptor de encendido en posición ON.
(3) Encienda el Techstream.
(4) Acceda a los siguientes menús: Chassis / Front Recognition Camera / Utility / Recognition Camera/Target Position Memory.
Chassis > Front Recognition Camera > Utility|
Pantalla del tester |
|---|
|
Recognition Camera/Target Position Memory |
(5) Pulse "Next".*1
(6) Confirme las condiciones que se muestran en la pantalla y, a continuación, pulse "Next".
(7) Siguiendo las indicaciones de la pantalla del Techstream, introduzca los siguientes valores para cada elemento.
|
Elemento | Valor |
|---|---|
|
Target Height | 1350 mm (53.15 pulg.) |
|
Target Distance | 3000 mm (118.11 pulg.) |
|
Distance between Targets |
550 mm (21.65 pulg.) |
| Target Size |
180 mm (7.09 pulg.) |
| Pitch Offset Angle |
0 deg. |
(8) Si se muestra "Recognition Camera/Target Position Memory has failed" en la pantalla del Techstream, confirme las condiciones que aparecen en la pantalla y, a continuación, pulse "Yes" y repita el procedimiento desde *1.
(9) Pulse "Exit" para salir de la utilidad Recognition Camera/Target Position Memory.
(b) Lleve a cabo el Recognition Camera Axis Adjust (posicionamiento del objetivo).
| (1) Coloque la SST de forma que quede alineada con la línea de posición del objetivo y de modo que la marca esté alineada con el punto K (posición de colocación 1), tal y como se muestra en la ilustración. |
|
(2) Ingrese a los siguientes menús: Chassis / Front Recognition Camera / Utility / Recognition Camera Axis Adjust.
Chassis > Front Recognition Camera > Utility|
Pantalla del tester |
|---|
|
Recognition Camera Axis Adjust |
(3) Pulse "Next".
(4) Compruebe que los valores almacenados en la ECU sean correctos y, a continuación, pulse "Next".
(5) Si aparece "Failed to read axis adjustment data" en la pantalla, lleve a cabo Recognition Camera/Target Position Memory y repita el procedimiento desde *1.
(6) Confirme las condiciones que se muestran en la pantalla y, a continuación, pulse "Next".
(7) Seleccione "Sequential recognition" y, a continuación, pulse "Next".
(8) Verifique que el objetivo se encuentra en el punto K (posición de colocación 1) y, a continuación, pulse "Next".
OBSERVACIÓN:
Si detrás de la zona donde se colocará el objetivo se encuentra algún objeto que pueda ser confundido como objetivo, oculte la zona situada detrás del objetivo con un objeto adecuado antes de pulsar "Next".
(9) Coloque la SST en el punto G (posición de colocación 2) y, a continuación, al punto J (posición de colocación 3) del mismo modo en el que estaba situado en el punto K (posición de colocación 1).
AVISO:
Coloque la SST y pulse "Next" dentro de los 3 minutos posteriores al cambio de la pantalla de ajuste del eje de la cámara de reconocimiento.
(10) Lleve a cabo el ajuste siguiendo las indicaciones de la pantalla del Techstream.
AVISO:
Si se visualiza un código de error, realice la localización de averías de acuerdo con la siguiente tabla y, a continuación, vuelva a realizar el ajuste.
|
N° del error | Error Description |
Cause of Error | Action to be Taken |
|---|---|---|---|
|
1 | Avería en el objetivo 1 (central) |
| Está prohibido acceder al área de ajuste durante el ajuste del eje del haz (no permita que nada pase entre el objetivo y el vehículo) |
|
Los valores almacenados en la cámara de reconocimiento/posiciones del objetivo son correctos | |||
|
La altura del objetivo y los puntos de ubicación son correctos | |||
|
No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
| |||
| Compruebe el estado de instalación de la cámara (La cámara está instalada correctamente (por completo) y se instaló después de colocar la cubierta) | |||
|
2 | Avería en el objetivo 2 (izquierdo) |
| Está prohibido acceder al área de ajuste durante el ajuste del eje del haz (no permita que nada pase entre el objetivo y el vehículo) |
|
Los valores almacenados en la cámara de reconocimiento/posiciones del objetivo son correctos | |||
|
La altura del objetivo y los puntos de ubicación son correctos | |||
|
No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
| |||
| Compruebe el estado de instalación de la cámara (La cámara está instalada correctamente (por completo) y se instaló después de colocar la cubierta) | |||
|
3 | Avería en el objetivo 3 (derecho) |
| Está prohibido acceder al área de ajuste durante el ajuste del eje del haz (no permita que nada pase entre el objetivo y el vehículo) |
|
Los valores almacenados en la cámara de reconocimiento/posiciones del objetivo son correctos | |||
|
La altura del objetivo y los puntos de ubicación son correctos | |||
|
No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
| |||
| Compruebe el estado de instalación de la cámara (La cámara está instalada correctamente (por completo) y se instaló después de colocar la cubierta) | |||
|
Se visualizan simultáneamente 1 y 4 |
Avería de objetivo 1 (central) atascado |
| La SST (objetivo) no se mueve debido al viento, etc. |
|
Ajuste el vehículo para que no se mueva
| |||
| No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
|
Se visualizan simultáneamente 2 y 4 |
Avería de objetivo 2 (izquierdo) atascado |
| La SST (objetivo) no se mueve debido al viento, etc. |
|
Ajuste el vehículo para que no se mueva
| |||
| No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
|
Se visualizan simultáneamente 3 y 4 |
Avería de objetivo 3 (derecho) atascado |
| La SST (objetivo) no se mueve debido al viento, etc. |
|
Ajuste el vehículo para que no se mueva
| |||
| No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
|
5 | Avería de posición e intervalo del objetivo |
| La altura del objetivo y los puntos de ubicación son correctos |
|
No hay objetos en el fondo que pudieran detectarse erróneamente como el objetivo, y el fondo está oculto | |||
|
9 | Avería de FOE y ángulo de rol |
| La altura del objetivo y los puntos de ubicación son correctos (el nivelado del área de ubicación se encuentra dentro del valor especificado. (Consulte la página 1. ASEGURE EL ÁREA ADECUADA PARA LLEVAR A CABO EL APRENDIZAJE)) |
|
Los valores almacenados en la cámara de reconocimiento/posiciones del objetivo son correctos | |||
|
La cámara está instalada correctamente (la cámara está instalada de forma apropiada (por completo) y se instaló después de colocar la cubierta) | |||
|
10 | Área de reconocimiento exterior de objetivo |
| Los valores almacenados en la cámara de reconocimiento/posiciones del objetivo son correctos |
(11) Pulse "Exit" para salir de la función "Recognition Camera Axis Adjust".
(12) Coloque el interruptor de encendido en posición OFF.
(13) Desconecte el Techstream del DLC3.
(c) Ha finalizado el aprendizaje del eje óptico de la cámara de reconocimiento de avance.
(d) Después de completar el ajuste del eje del haz, borre las entradas del historial de control del sistema del vehículo.
(1) Borre el historial de control del vehículo (sistema de control de la velocidad de crucero de radar dinámico).
Haga clic aquí
(2) Borre el historial de control del vehículo (sistema de la cámara delantera).
Haga clic aquí
(3) Borre el historial de control del vehículo (sistema de asistencia al seguimiento de carril).
Haga clic aquí
(4) Borre el historial de control del vehículo (Road Sign Assist System).
Haga clic aquí
(5) Borre el historial de control del vehículo (Pre-collision System).
Haga clic aquí
(6) Borre el historial de control del vehículo (Lighting System).
Haga clic aquí
 Ajuste De Referencia (reconocimiento De Una Sola Vez)
Ajuste De Referencia (reconocimiento De Una Sola Vez) Ajuste Previo A La ConducciÓn
Ajuste Previo A La ConducciÓnCircuito del motor del soplador
DESCRIPCION El subconjunto del motor del soplador
con ventilador se acciona a traves de senales procedentes del conjunto del
amplificador del aire acondicionado. Las senales de velocidad del motor del
soplador se transmiten segun los cambios de la relacion de trabajo.
Si el volumen del flujo ...
ComprobaciOn/borrado De Dtc
COMPROBACION/BORRADO DE DTC COMPRUEBE SI SE EMITEN
DTC (a) Conecte el Techstream al DLC3. (b) Coloque el interruptor
de encendido en posicion ON. (c) Encienda el Techstream. (d)
Ingrese a los siguientes menus: Chassis/Circumference Monitoring Camera Control
Module/Trouble Codes. Chassis / Circum ...
Pastilla Del Freno De Disco Trasero (con Sistema Del Freno De Estacionamiento Eléctrico)
ComponentesCOMPONENTES ILUSTRACIÓN
*1 CONJUNTO DE CABLES DEL FRENO DE ESTACIONAMIENTO NO. 2
*2 KIT DEL CALCE ANTICHIRRIDO DEL DISCO DE FRENO TRASERO
*3 PASTILLA DEL FRENO DE DISCO TRASERO
*4 CONJUNTO DEL CILINDRO DEL FRENO DE DISCO TRASERO
*5 CALCE AN ...